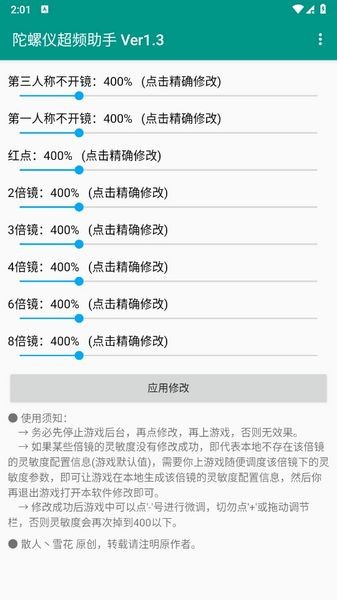
这款工具能协助你精准调整陀螺仪的响应延迟与精度,在各种倍镜灵敏度设置下,都能保持流畅稳定的射击表现和顺手的操作体验。通过微调各项参数,你可以逐步摸索出最契合个人习惯的操控方案。尤其针对陀螺仪延迟问题,软件提供了有效的修复机制,显著缩短输入响应时间,让你在关键时刻更快锁定目标、迅速应对战场变化,整体提升操作的跟手性与实战效率。
陀螺仪延迟修复器app特色
操作界面简洁直观,轻松上手。用户可根据自身习惯自定义各类游戏参数,打造贴合个人风格的操作环境。
兼容多款热门手游,尤其针对吃鸡类游戏深度适配,在保障功能稳定的同时兼顾账号安全。
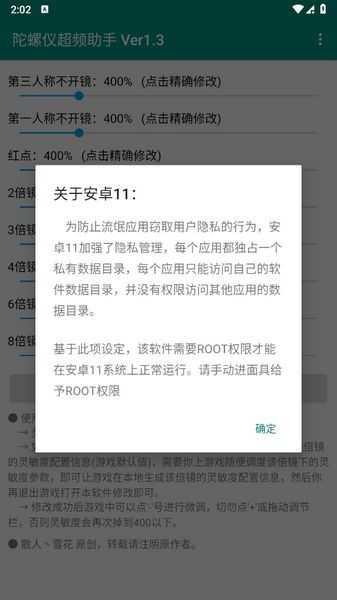
注重用户隐私与设备安全,无需ROOT权限即可运行,绿色无毒,使用过程中不会触发封号风险。
安装后即开即用,无需复杂设置。清爽的设计风格带来顺畅的操作感受,整体体验轻盈流畅。
新版安装包体积精简,对手机存储空间占用极小,各项功能设置逻辑清晰,掌握后能显著提升游戏操控表现。
陀螺仪延迟修复器app亮点
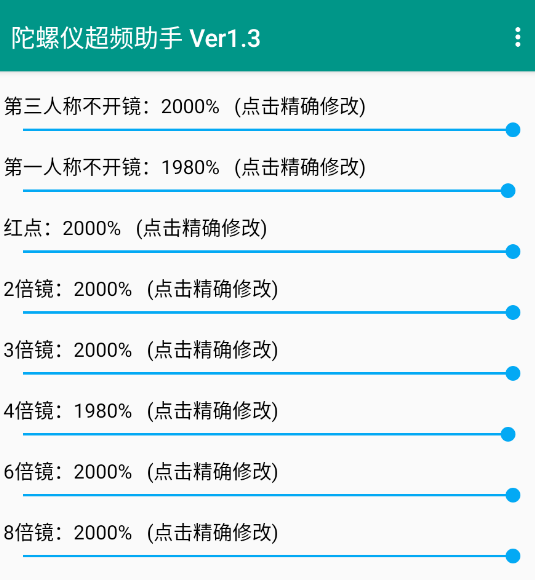
支持精细化调整游戏内射击参数,有效缩小瞄准偏差,提升命中率与操作舒适度。
内置丰富实用功能模块,满足玩家多样化需求,使用过程更加顺心如意。
画质与分辨率可自由切换,适配不同设备性能,确保在各种场景下都能灵活应用。
陀螺仪延迟修复器app教程
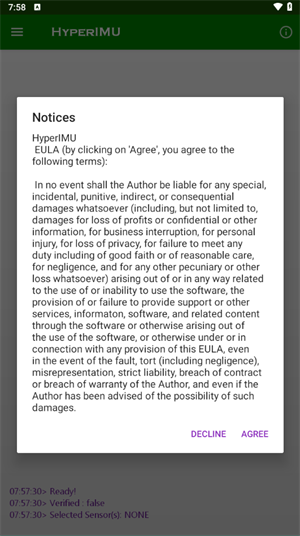
启动软件后会弹出隐私协议提示,确认内容无误后即可继续后续操作;
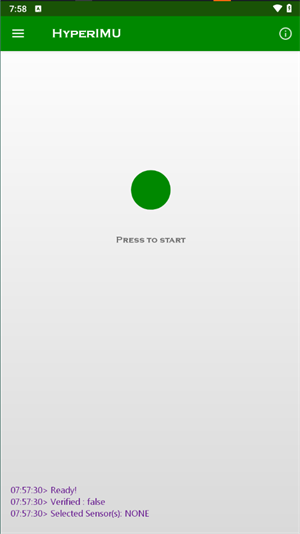
根据指引点击屏幕上的绿色圆点,完成系统要求的交互步骤;
勾选所需功能项目,确保所选项符合当前使用需求;
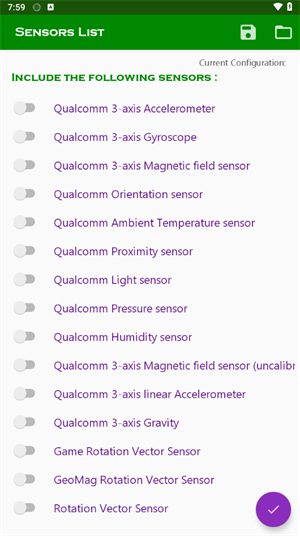
确认选择后,软件将自动执行陀螺仪状态检测与校准流程。
陀螺仪延迟修复器app优势
实时检测陀螺仪运行状态,快速识别漂移、延迟或无响应等异常情况;
采用专业校准算法,重新标定陀螺仪数据,有效消除累积偏差,提高感应准确性;
支持手动调节数据采样频率,在灵敏度、精度与系统负载之间取得平衡;
提供高级自定义选项,包括轴向灵敏度微调等,适配不同游戏及操作习惯;
主动排查并尝试修复由软件冲突或配置错误引发的陀螺仪功能异常。
陀螺仪延迟修复器app调整
检查镜头视场角是否出现异常偏移;
验证陀螺仪方向标定结果,正常状态下数值应在零点附近小幅波动;
确认在线零偏参数处于合理范围;
防抖模式建议选择录像模式(record或ipc模式)以获得最佳效果;
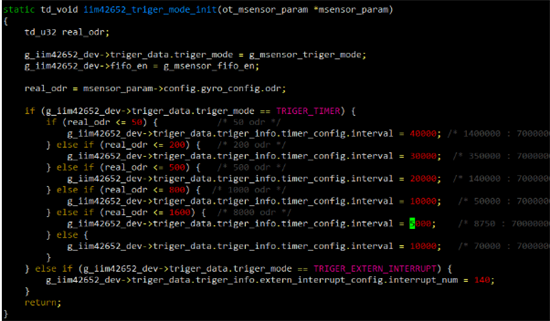
核对陀螺仪数据输出组数是否正常:
测试采用iim42652陀螺仪时,使用fifo模式采集数据,1000Hz采样率下每5ms获取一次;hi3516dv500芯片需按厂商规范配置,若每50ms读取一次易造成数据丢失;
在hi3516dv300平台上,vi模块获取的陀螺仪数据需先设定裁剪坐标,再经vpss模块处理;
防抖效果测试建议在曝光时间低于10ms时进行,过短反而影响成像稳定性;
默认使用spi接口以10M速率通信,若改用i2c可能因带宽不足导致数据延迟;
开启vichn低延时模式可能导致防抖画面缩放异常,关闭该选项即可恢复正常。
陀螺仪延迟修复器app问题
采样率是什么,和灵敏度一样吗?
采样率指陀螺仪每秒上报数据的次数,与灵敏度无直接关联。高采样率带来更快响应,但会增加设备发热与耗电,需根据实际需求权衡取舍;
为什么实际采样率和设置值略有出入?
安卓系统会对采样率进行量化处理,例如在81–100Hz区间内设置,最终均会统一为100Hz;
最大采样率能达到多少?
具体上限由设备陀螺仪硬件决定,通常不低于200Hz,将设置拉至最高即可启用硬件支持的最大采样率;
除了发热和耗电,高采样率还有其他影响吗?
部分情况下可能导致CF手游中的辅助瞄准效果减弱,具体机制尚不明确且表现不稳定;
是否必须在进入游戏前启动本工具才能生效?
无需提前启动,任意时刻开启均可立即提升陀螺仪采样率并即时生效。
陀螺仪延迟修复器app分析
物体在旋转过程中,若不受外力矩干扰,其旋转轴方向保持不变,这一特性可用于测量角位移或角速度。
核心工作原理基于角动量守恒定律:当系统所受合外力矩为零时,总角动量保持恒定。角动量由矢径与动量的叉积定义:
矢量运算中,点积a・b=abcosθ得到标量,叉积a×b=absinθ产生矢量,方向遵循右手螺旋定则;
角动量L=r×p,其中r为从旋转中心指向质点的矢径,p为动量(mv),方向与线速度一致,典型示例中L方向垂直向上;
理想陀螺在无空气阻力、支撑摩擦极小的条件下,合外力矩近似为零,角动量守恒得以维持。
陀螺仪具备两大基本特性:
定轴性:高速旋转的转子在无外力矩作用时,自转轴方向高度稳定,抵抗外界干扰引起的轴向变化;
进动性:当外力矩施加于高速旋转的转子时,其转动方向与外力矩方向垂直,表现为绕另一轴的旋转运动。
可测量的物理量包括:
角速度:用于捕捉设备在偏转或倾斜过程中的旋转速率;
空间方向:涵盖俯仰角(绕x轴)、偏航角(绕z轴)及翻滚角(绕y轴)三个维度的姿态信息。
关键性能参数分为两类:
通用传感器参数:如线性误差、分辨率、采样频率;
陀螺仪特有参数:包括量程(dps)、灵敏度(刻度因子)、初始误差、动态误差、非线性度、初始零漂及其温度漂移系数。
在惯性导航系统中,陀螺仪配合加速度计共同工作,通过连续测量角速度与线加速度,经积分运算推导出载体的速度与相对位移,再结合初始位置信息,最终确定当前位置坐标。